TPU MatMul Kernel 矩阵乘法算子
矩阵乘法(MatMul)是机器学习的核心运算。对矩阵乘法进行高效实现,对于充分利用Google TPU等硬件加速器尤为重要。JAX的Pallas框架允许开发者为TPU编写低级别的、高度优化的Kernel。在本文中,我将分享我使用JAX Pallas实现MatMul Kernel的初步探索,展示不同优化策略如何影响TPU性能。
Why Optimize MatMul for TPUs?
与GPU不同,TPU采用的是专为机器学习设计的SIMD脉动阵列(Systolic Array)架构。然而,想要实现最佳性能,需要精细地考虑内存使用、并行化策略和数据精度。
下面我们将深入不同实现方式,并总结各自的效果和启示。
Kernel Implementations Explored
1. Naive MatMul
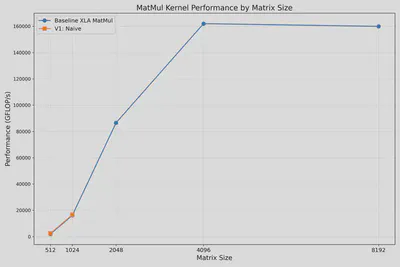
最基础的Kernel一次性将整个矩阵加载到TPU的向量内存(VMEM)中:
def matmul_v1_kernel(a_ref, b_ref, o_ref):
o_ref[...] = a_ref[...] @ b_ref[...]
在该实现中,输入矩阵 [M, K] 和 [K, N] 完全加载到VMEM,输出矩阵 [M, N] 也存储在VMEM。尽管简单,但当矩阵尺寸超过1024时,内存迅速耗尽。下图显示只能处理 M=K=N ≤ 1024的尺寸。当尝试 [2048, 2048] 时,会发生“内存耗尽”的错误.
2. Parallel MatMul
将矩阵拆分成更小的块可以降低VMEM使用量:
def matmul_v2_parallel_kernel(a_ref, b_ref, o_ref):
o_ref[...] = a_ref[...] @ b_ref[...]
@functools.partial(jax.jit, static_argnames=['N'])
def run_matmul_v2(a: jax.Array, b: jax.Array, N: int):
kernel = pl.pallas_call(
matmul_v2_parallel_kernel,
grid=(N, N),
in_specs=[
pl.BlockSpec((a.shape[0] // N, a.shape[1]), lambda i, j: (i, 0)),
pl.BlockSpec((b.shape[0], b.shape[1] // N), lambda i, j: (0, j)),
],
out_specs=pl.BlockSpec(
(a.shape[0] // N, b.shape[1] // N), lambda i, j: (i, j)),
out_shape=jax.ShapeDtypeStruct((a.shape[0], b.shape[1]), a.dtype)
)
return kernel(a, b)
该Kernel将矩阵A按行、矩阵B按列切分。虽然稍微降低了内存消耗,但获得的并行性能仍然低于XLA内置的jnp.matmul()函数。下图显示了N=4的并行结果,可处理最大尺寸提升到2048,但性能仍不及XLA库: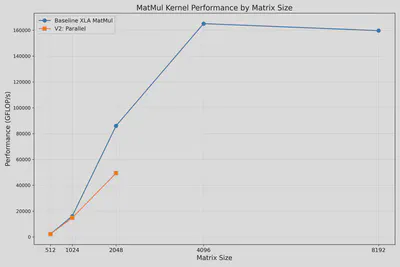
3. Block-Based MatMul (3D Grid)
采用3D网格分块的方法进一步优化内存管理。此前,将整个 [block, M] 或 [M, block] 矩阵加载到VMEM占用仍较大。我们可以定义一个3D网格[bm, bk, bn],更细粒度地切分输入输出矩阵,并在每个K迭代中初始化输出:
def matmul_v3_block_kernel(a_ref, b_ref, o_ref):
@pl.when(pl.program_id(2) == 0)
def init():
o_ref[...] = jnp.zeros_like(o_ref)
# 累加每个block的乘法结果
o_ref[...] += a_ref[...] @ b_ref[...]
@functools.partial(jax.jit, static_argnames=['bm', 'bk', 'bn'])
def run_matmul_v3(
a: jax.Array,
b: jax.Array,
*,
bm: int = 128,
bk: int = 128,
bn: int = 128):
m, k = a.shape
_, n = b.shape
assert k == b.shape[0]
run_kernel = pl.pallas_call(
matmul_v3_block_kernel,
grid=(m // bm, n // bn, k // bk),
in_specs=[
pl.BlockSpec((bm, bk), lambda i, j, k: (i, k)),
pl.BlockSpec((bk, bn), lambda i, j, k: (k, j)),
],
out_specs=pl.BlockSpec((bm, bn), lambda i, j, k: (i, j)),
out_shape=jax.ShapeDtypeStruct((m, n), a.dtype),
)
return run_kernel(a, b)
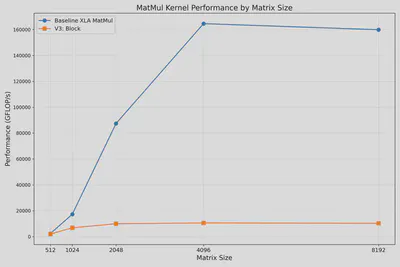
此实现显著降低了内存占用,可以处理更大矩阵,但性能依然落后于XLA优化库。下图显示所有尺寸均可成功计算,但性能较差:
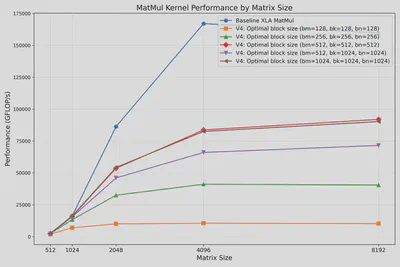
4. Optimal Block Size Strategy
与GPU不同,TPU并非基于线程并行执行,而是SIMD脉动阵列,单个Kernel表现为顺序执行模式。因此,通过搜索最佳block尺寸(bm, bk, bn)可以达到更优性能:
下图展示了寻找最佳尺寸的过程。实验表明(bm, bk, bn)=(512, 512, 512)下取得了最佳FLOP/s性能。
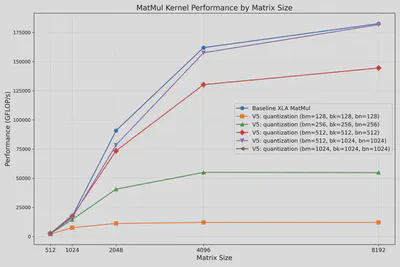
5. Precision Optimization: Quantization
最优的分块尺寸会随精度的变化而改变。以下是采用BFLOAT16精度时的最佳性能表现。(bm, bk, bn)=(512, 1024, 1024)几乎达到XLA库jnp.matmul()的性能:
Key Insights
- 内存管理:有效的内存拆分与分块是实现TPU高效并行的关键。
- 分块尺寸:选择最佳分块尺寸能极大影响性能,需要实验进行调优。
- 精度重要性:使用更低精度(如BFLOAT16)能提升性能及内存效率,特别是在更大规模时。
通过此次基于JAX Pallas框架的探索,我们获得了针对TPU优化的宝贵经验。定制Kernel使开发者能进一步挖掘硬件潜力,实现机器学习工作负载的显著性能提升。
欢迎访问repository ,以复现实验并进一步探索!
Acknowledgements
This project is inspired by JAX’s Pallas framework and builds upon the TPU programming model.